

Quadcopter #4

Parts
Generic F450 Frame
(4) DJI 2212 Motors (real ones!)
(4) DYS Programmable V2 ESCs (30A)
(4) DJI 1045 Blades
TS5823 5.8Ghz 32 Ch Transmitter (video)
Boscam CM210 Camera
Generic 1 Axis Gimbel
Spektrum AR8000 8 Ch Receiver
Generic 5V UBEC
HKPilot Mega 2.7 Set
Overhead Display Module
LEA-6H GPS
Power Monitoring Module
433Mhz Telemetry Radio(s)
Performance
Using these blades I was able to get about 3.1
pounds of lift. With Tri-Blades I got an additional 1.5 pounds but
it sucked the life out of the battery. I eventually wound up
shortening the GPS mast. The length made it vibrate and screwed up
the navigation.
I have been using this Quadcopter as a testbed for my autonomous
software. It has already been flown totally hand-off. I
wrote a program which had it liftoff from my house by timer and land in
a field about a half mile from my house, within 6' of the programmed
location. This Quad also has an twin brother (Quadcopter 4b) which I
have been using to fly programmed formations.
Test Flight

Gotchas - Watch Out
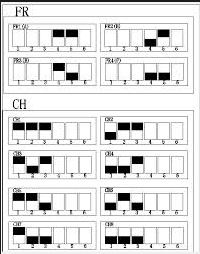
As noted in other pages on this site, the
TS5823 5.8Ghz Transmitter's DIP Switch settings are reversed in the
documentation. This was verified with a Spectrum Analyzer.
The documentation show the DIP Switch heads as being Black (instead of
White) so just reverse everything. Also, transmitter gets hot and
is subject to thermal problems. I actually soldered down the metal
housing to the copters PCB board. This helped cool it down.
Also, the Boscam CM210 camera wiring is wrong. The connector on
camera should be image (white or yellow), ground (Black), bias (Red).
The three wire cable given is wired ground, image, bias (this is wrong).
One last thing, avoid mounting the MegaSet controller on foam or
Two-Phase tape. The accelerometers inside the housing need to flat to the Quad's
mounting plate. I used the foam tape to dampen vibration only to
find the Quad was flying crooked.